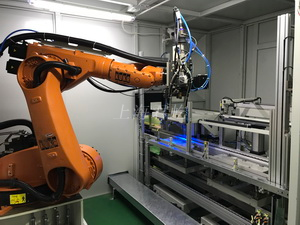


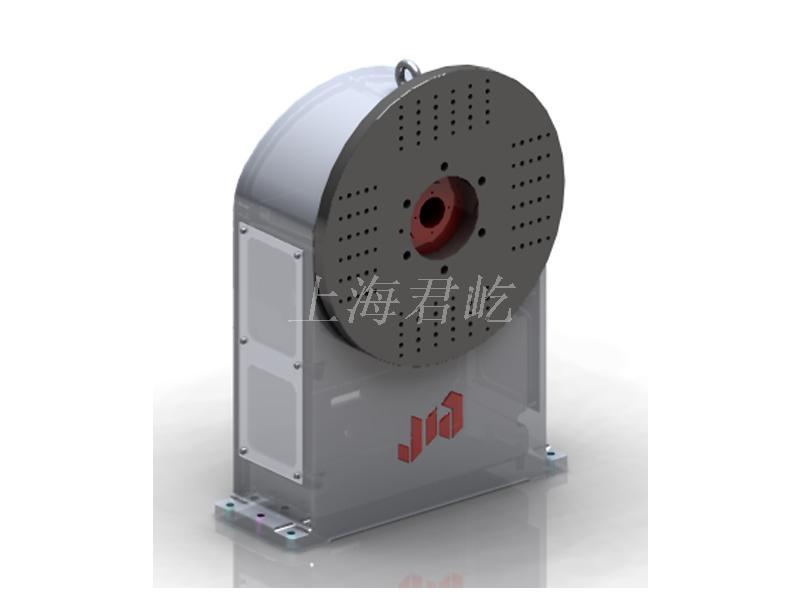
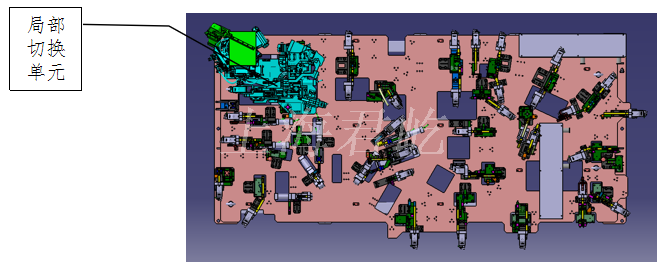
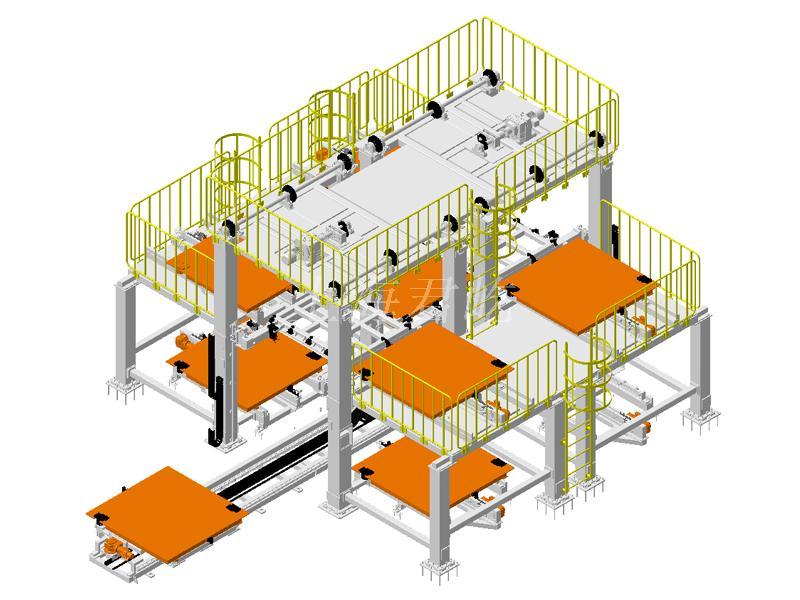
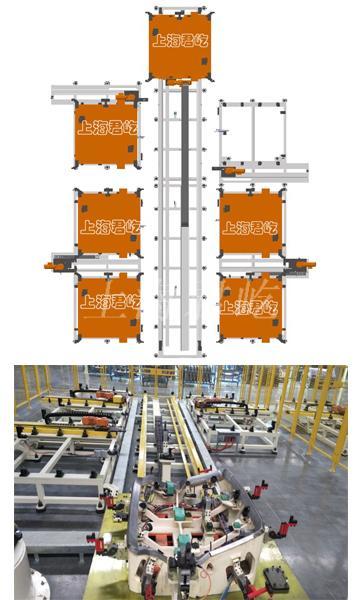
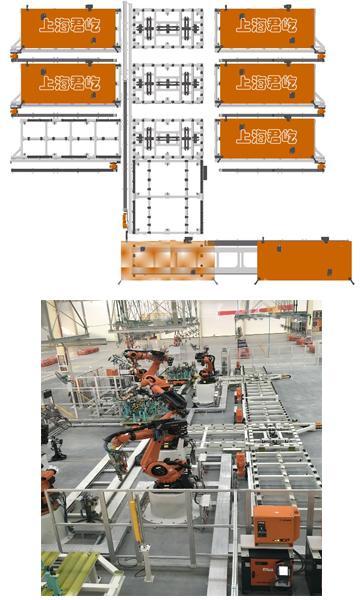
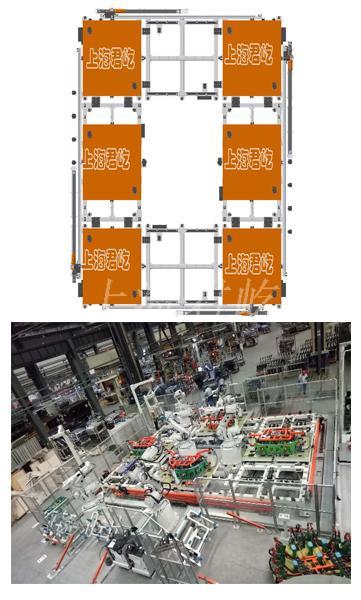
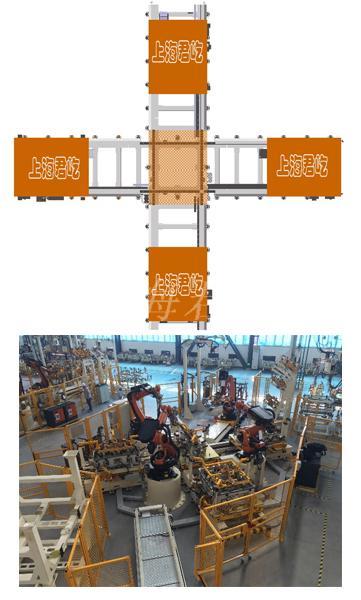
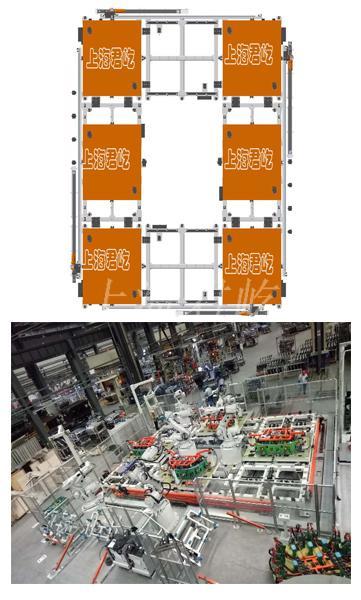
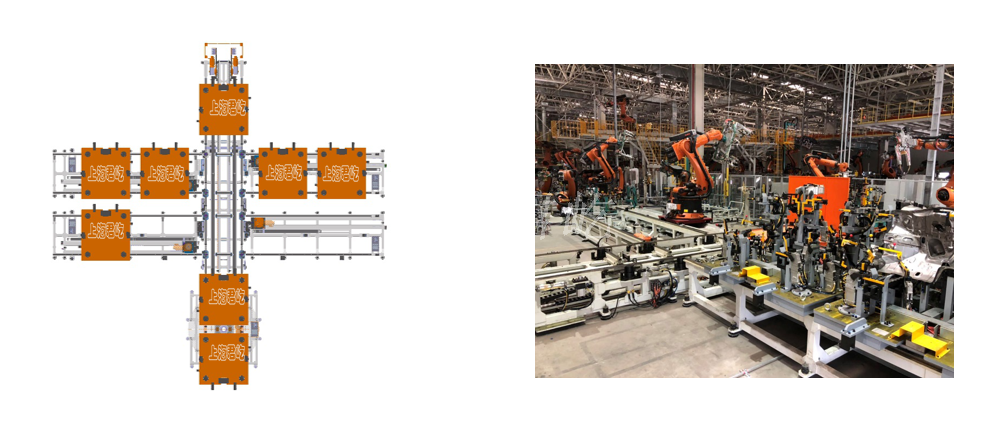
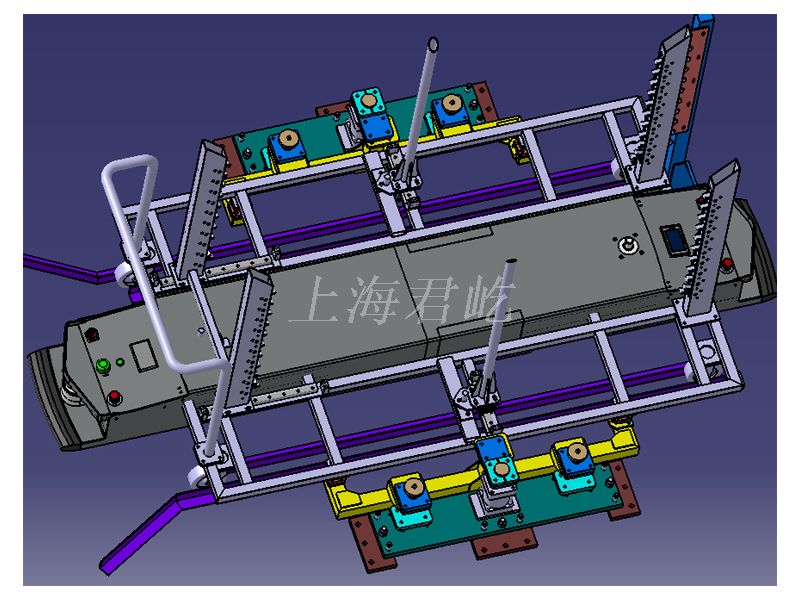
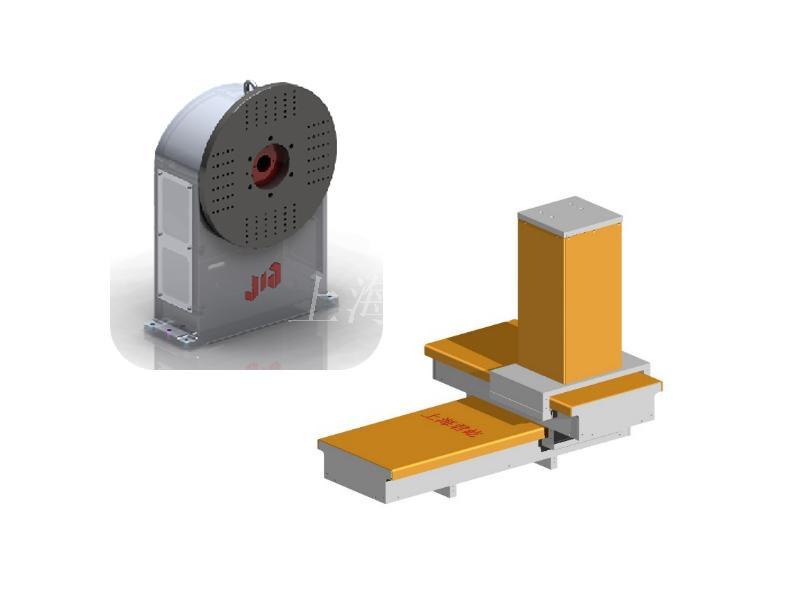
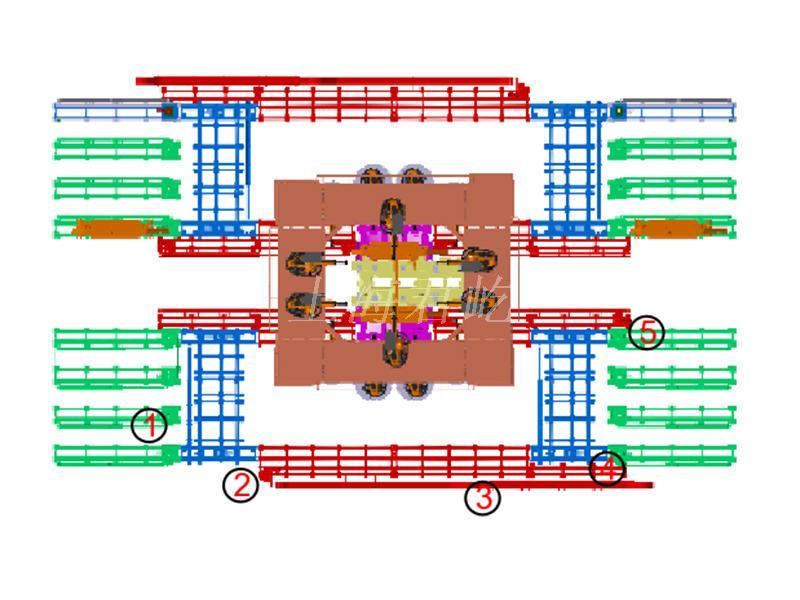
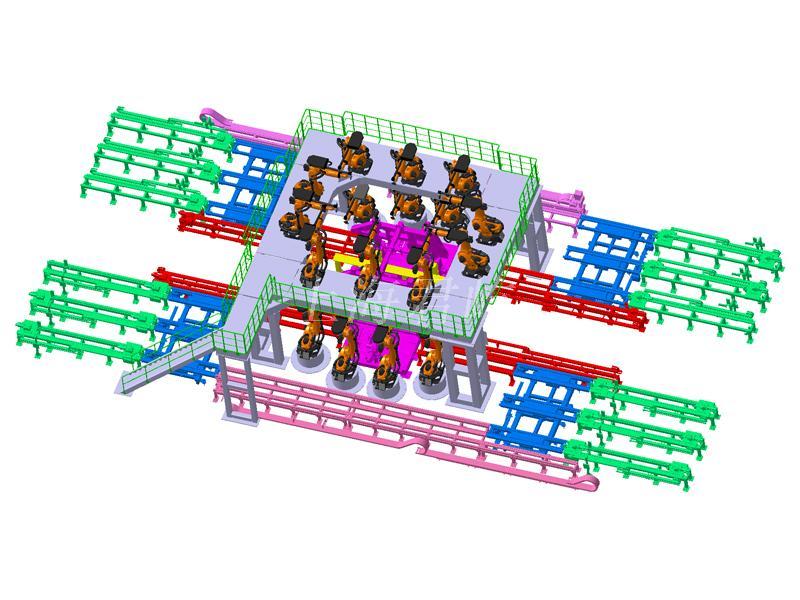
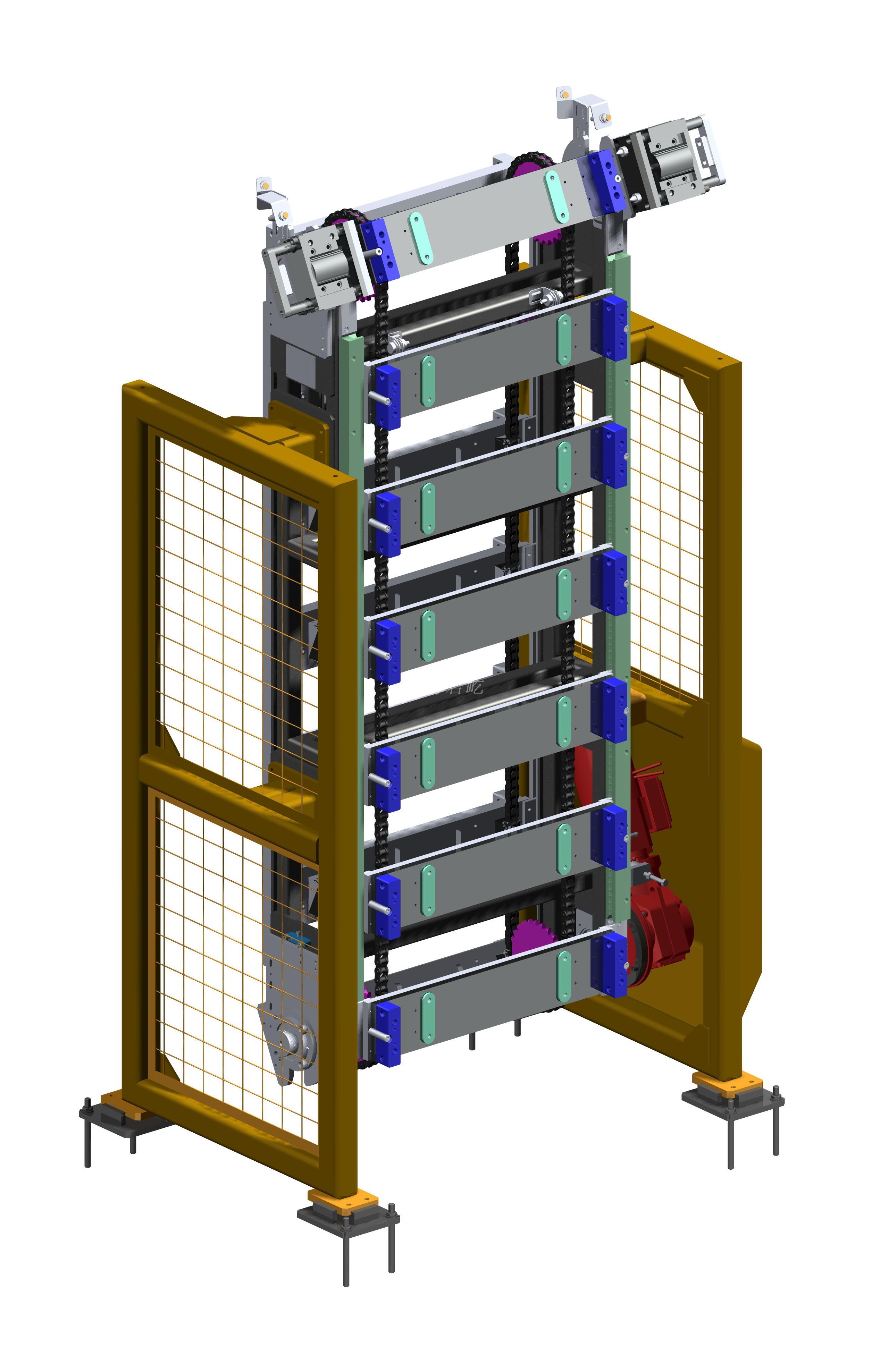
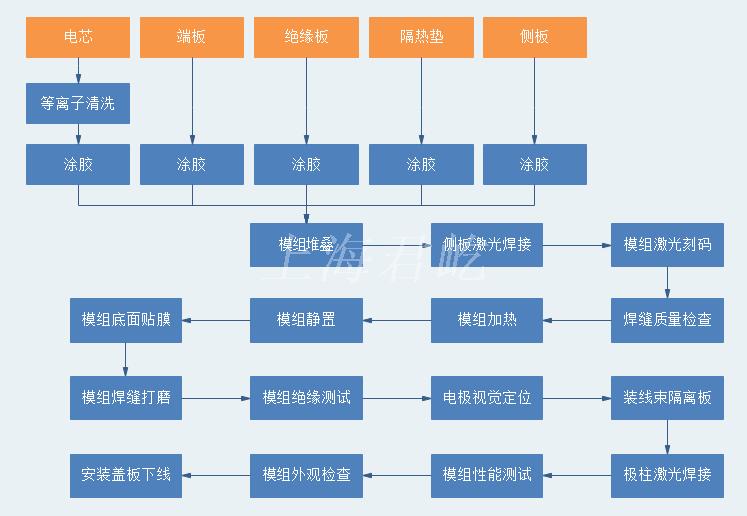
風車切換技術:
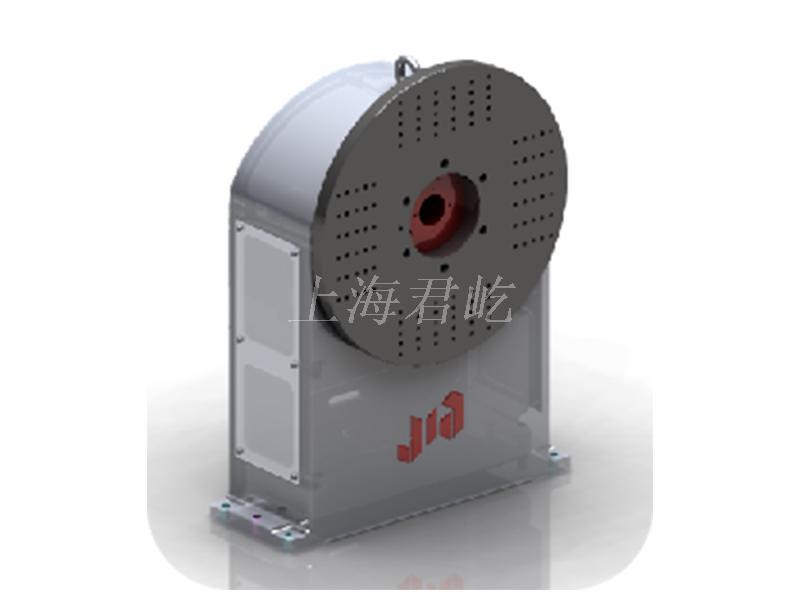
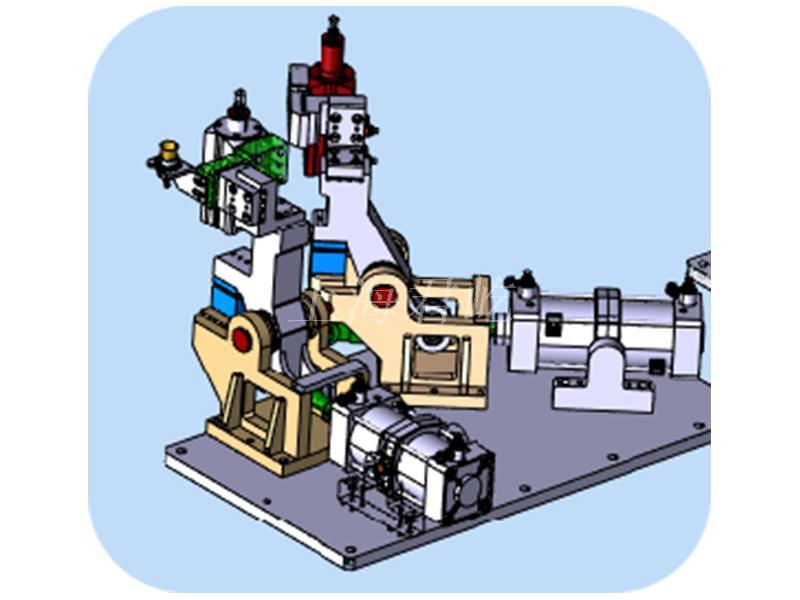
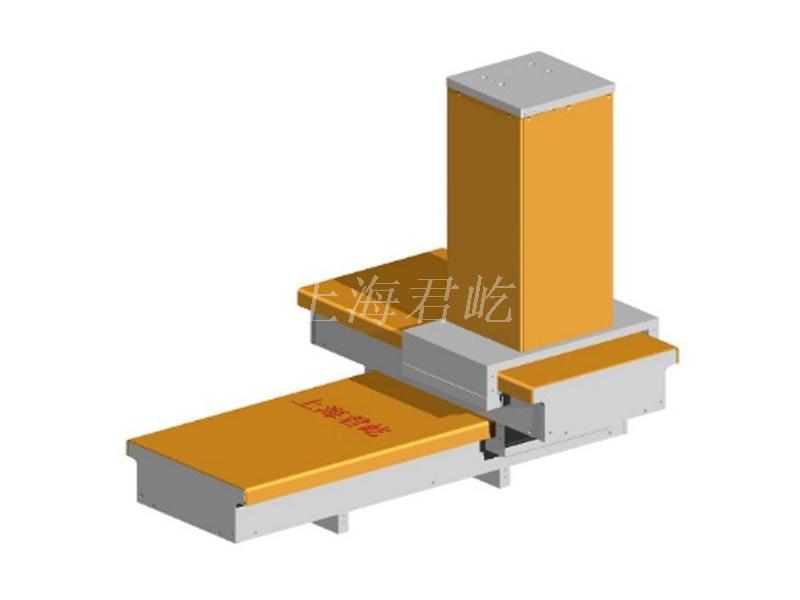
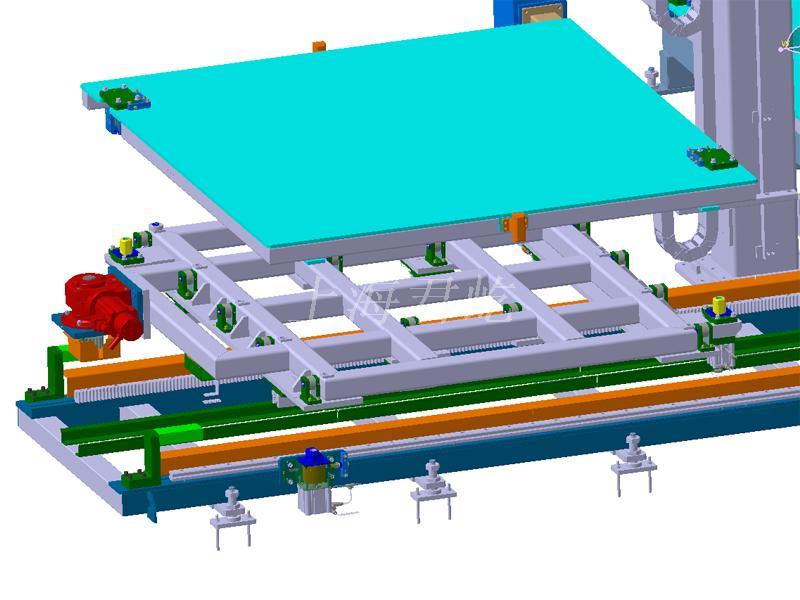
采用電機驅動與分度盤精密到位控制的切換單元,滿足4車型定位單元切換,占用空間小,切換速度快。
 |
 |
|
名稱
|
參數
|
| 額定靜載荷 | 200kgf |
|
重復定位精度(直徑φ400mm)
|
±0.05mm |
|
X向容許偏心距離
|
≤200mm
|
|
Y向容許偏心距離
|
≤200mm |
|
夾具固定板直徑
|
400mm(可定制) |
| 工位數 | 4工位(帶工位識別) |
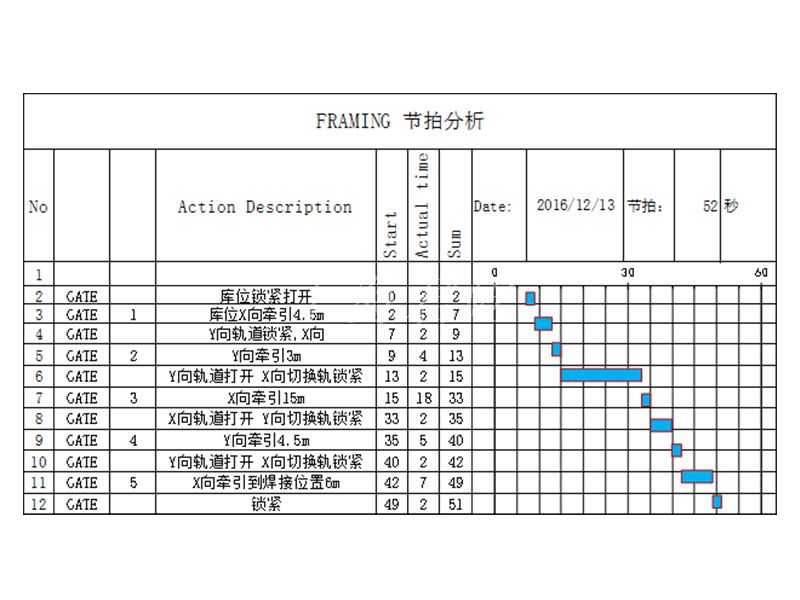
| 節拍(90度) |
3.5s
|
| 輸入控制電壓 |
AC220V
|
| 控制電氣接入 | Harting(快插接頭) |
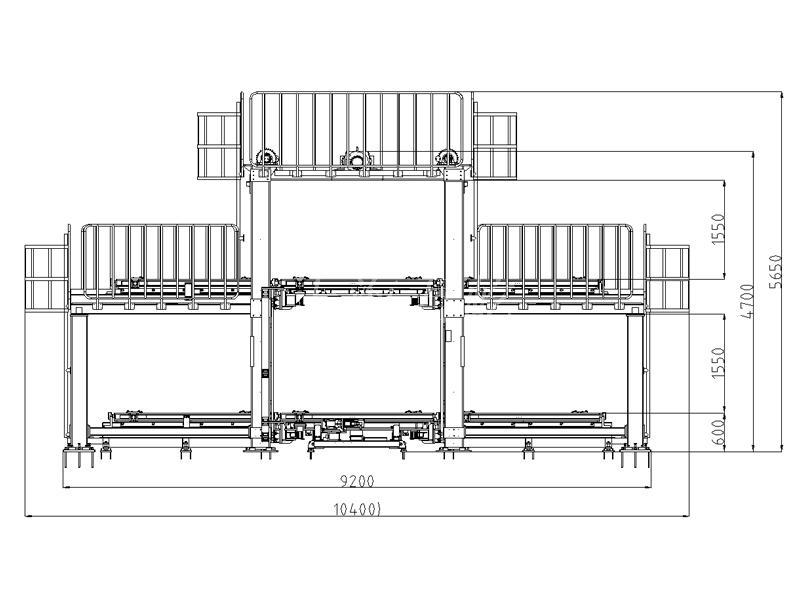
| 外形尺寸 | L550mm*W195mm*H660mm |

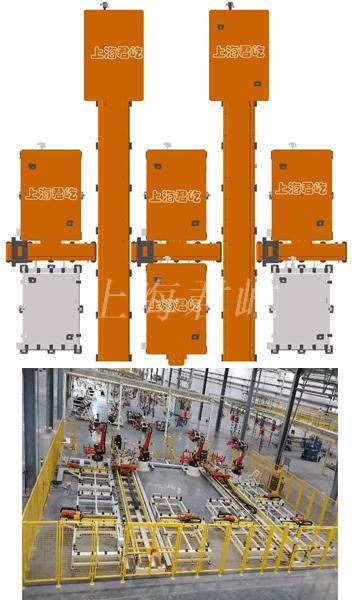

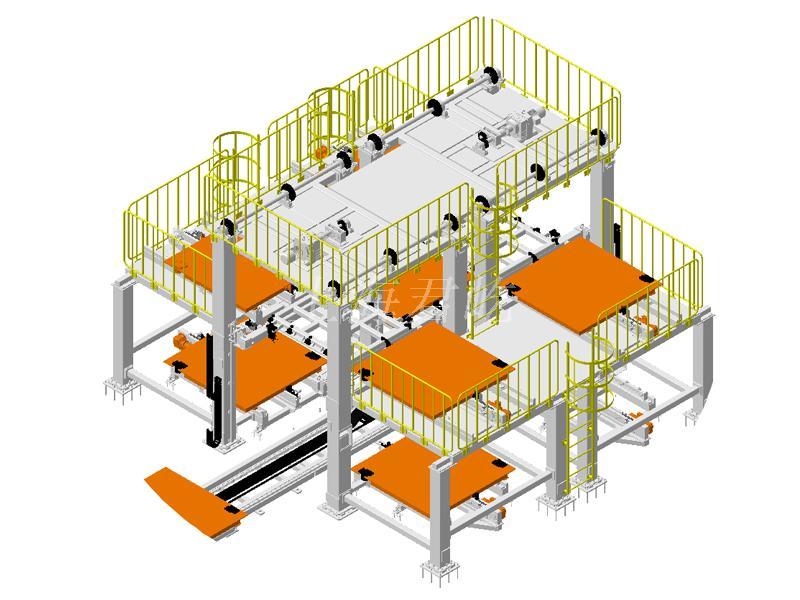
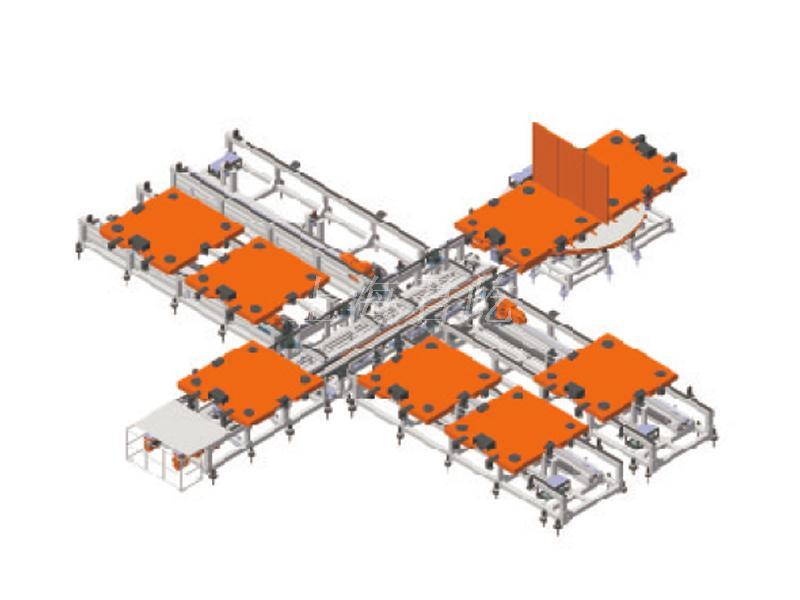
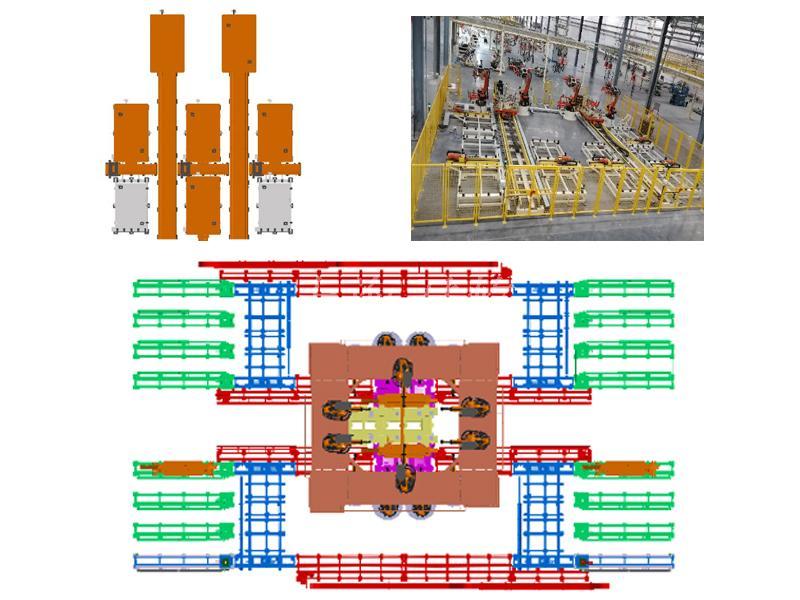
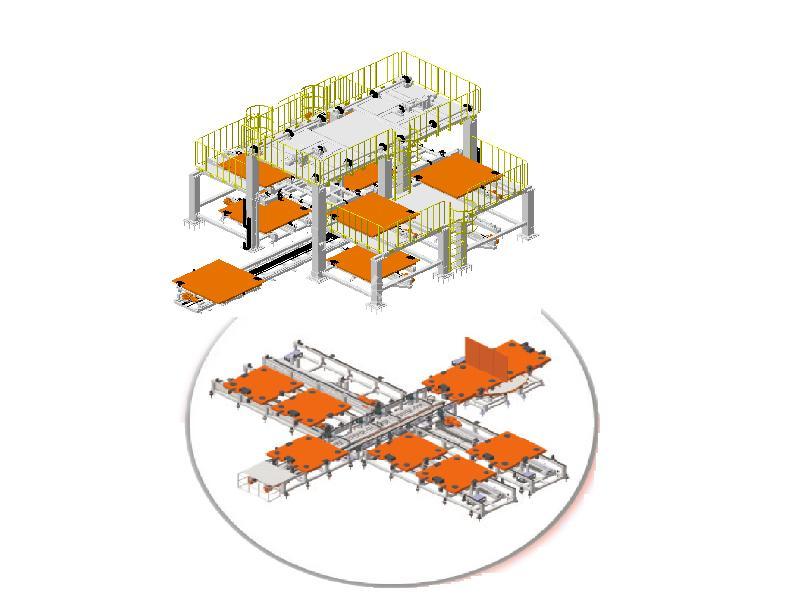
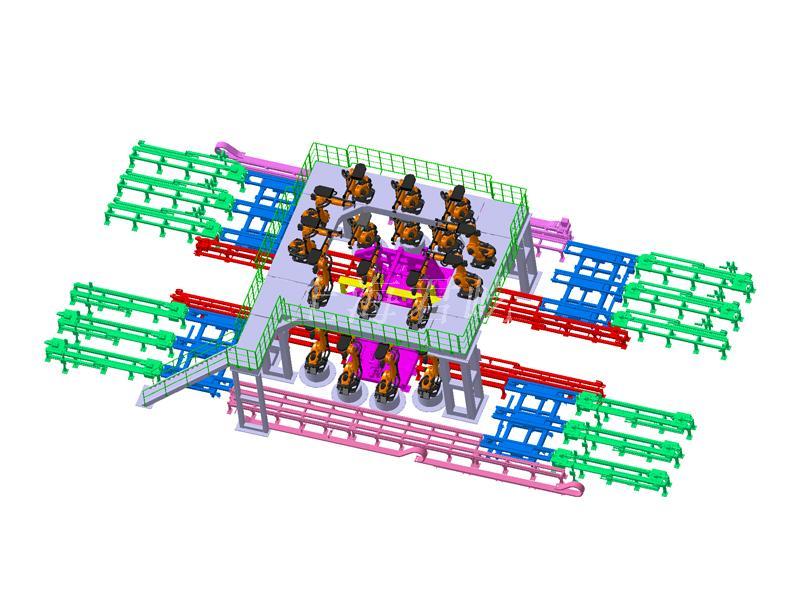




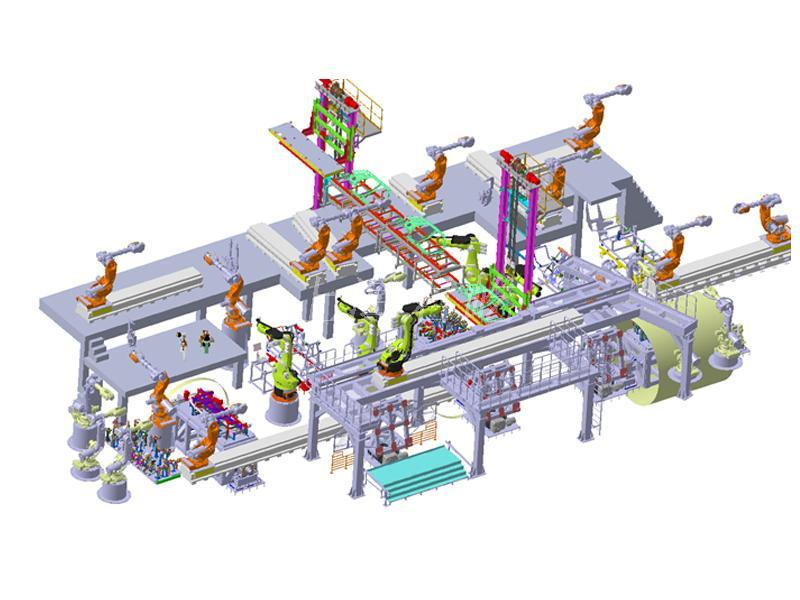







































 主線
主線 主線(總拼)
主線(總拼) 側圍
側圍
















 A&B柱焊接
A&B柱焊接 地板焊接
地板焊接